| Mode | Wi-Fi 2.4G/5G | AOA | LTE CatM1 | BLE5.2 |
|---|---|---|---|---|
| DSGW-200-1 | ● | ● | ● | ● |
| DSGW-200-2 | ● | ● | ● | |
| DSGW-200-3 | ● | ● |
1. Introduction
DSGW-200 is indoor Locator for Bluetooth AoA Positioning. It can reach a positioning accuracy of0.3-1 metersin the 2D plane. At the same time, it has the characteristics of low power consumption,low delay, low radiation and strong anti-interference. A signal locator can achieve 2D positioning.DSGW-200 is suitable for personnel tracking and real-time positioning of assets in smarthealthcare, smart factories, smart factories, smart offices, and smart education.DSGW-200 also have IoT gateway function, it support the Zigbee, Z-wave, BLE wireless protocol.
· Support 5V USB type-c power supply
· Support IEEE802.3-2012 Type 1, the IEEE802.3-2012 Type 1 requires a power supply device
(PSE) to provide 44 to 57V, and the power of the powered device (PD) must not exceed 12.95W and the current does not exceed 350 mA.
· Support IEEE802.11ac, IEEE802.11a, IEEE802.11n, IEEE802.11g, IEEE 802.11b Protocol
· Support AoA Antenna array
· Support Bluetooth 5.2
· One WAN/LAN variable network port
2. Mechanical Requirement



3. Specifications
| Category | Specifications | |
|---|---|---|
| Power Supply | USB type-C 5V/3A | |
| Reset button | The reset button is hole button, After pressing the reset button for more than 5 seconds, the Locator will be restored to the factory settings. | |
| Network Interface | The network interface supports CAT-5/CAT-5E to transmit data and POE Power Supply (voltage range is 44~ 57V).WAN*1 | |
| Indicator LEDs | 1).Power &battery LED 2). BLE LED 3).Wi-Fi LED 4)LTE indicator | |
| Antenna array direction finding | 4*4 Antenna Array | |
| Installation method | Ceiling, Wall mounting | |
| RTC | Real Time Clock operated from on board battery | |
| Operating Temperature | -10℃~60℃ | |
| Storage Temperature | -40℃~85℃ | |
| Operating humidity | 10%~90% | |
| Cooling | Heat dissipation silicone/aluminum | |
| positioning accuracy | 0.3-1 meter | |
| Detect range | 360° array antenna, Angle of Arrival measurement in the 2.4GHz band | |
3.2 Performance Requirement
| Wi-Fi Performance | · IEEE wireless LAN standard: IEEE802.11ac; IEEE802.11a; IEEE802.11n; IEEE802.11g; IEEE 802.11b l · Data Rate: IEEE 802.11b Standard Mode:1,2,5.5,11Mbps IEEE 802.11g Standard Mode:6,9,12,18,24,36,48,54 Mbps IEEE 802.11n: MCS0~MCS7 @ HT20/ 2.4GHz band MCS0~MCS7 @ HT40/ 2.4GHz band MCS0~MCS9 @ HT40/ 5GHz band IEEE 802.11ac: MCS0~MCS9 @ VHT80/ 5GHz band · Sensitivity: VHT80 MCS9 : -60dBm@10% PER(MCS9) /5GHz band HT40 MCS9 : -63dBm@10% PER(MCS9) /5GHz band HT40 MCS7 : -70dBm@10% PER(MCS7) /2.4GHz band HT20 MCS7 : -71dBm@10% PER(MCS7) /2.4GHz band · Transmit Power: IEEE 802.11ac: 13dBm @HT80 MCS9 /5GHz band IEEE 802.11ac: 16dBm @HT80 MCS0 /5GHz band IEEE 802.11n: 14dBm @HT20/40 MCS7 /5GHz band IEEE 802.11n: 16dBm @HT20/40 MCS0 /5GHz band IEEE 802.11n: 16dBm @HT20/40 MCS7 /2.4GHz band IEEE 802.11g: 16dBm @54MHz IEEE 802.11b: 18dBm @11MHz · Wireless Security: WPA/WPA2, WEP, TKIP, and AES · Working mode: Bridge, Gateway, AP Client · Range: 50 meters minimum, open field · Transmit Power:17dBm · Highest Transmission Rate: 300Mbps · Frequency offset: +/- 50KHZ · Frequency Range (MHz): 2412.0~2483.5 · Low Frequency (MHz):2400 · High Frequency (MHz):2483.5 · E.i.r.p (Equivalent Isotopically Radiated power) (mW)<100mW · Bandwidth (MHz):20MHz/40MHz · Modulation: BPSK/QPSK, FHSSCCK/DSSS, 64QAM/OFDM |
| Bluetooth- Performance | · TX Power: 19.5dBm · Range: 150 meters minimum, open filed · Receiving Sensibility: [email protected]%BER · Frequency offset: +/-20KHZ · Frequency Range (MHz):2401.0~2483.5 · Low Frequency (MHz):2400 · High Frequency (MHz):2483.5 · E.i.r.p (Equivalent Isotopically Radiated power) (mW)<10mW · Bandwidth (MHz):2MHz · Modulation: GFSK |
| WAN/LAN | 10/100M bps |
4. QA Requirements
| Information Description | Standard(Yes) custom(No) |
|---|---|
| ESD Testing | Yes |
| RF Antenna Analysis | Yes |
| Environmental Testing | Yes |
| Reliability Testing | Yes |
| Certification | FCC, CE, Bluetooth(BQB), PTCRB, RoHs |
5. Application
The gateway has an array antenna, the beacon sends Bluetooth data, and the gateway can receive or send Bluetooth signals when switching between different antennas.

Antenna array design
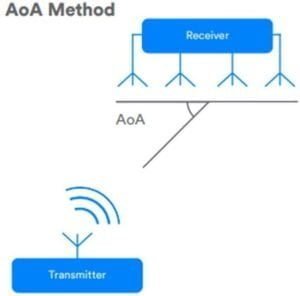
Angle of arrival operation
Measure and detect the phase difference of the Bluetooth signal between different receiving antennas,and then calculate the angle of arrival of the signal based on this information and the known distance between the different antennas.
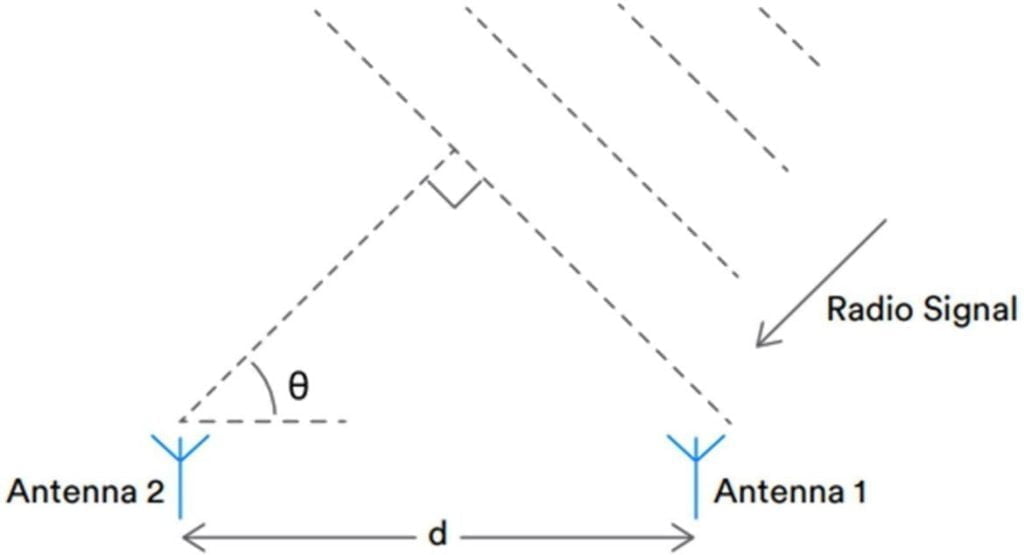
Derive AoA from the phase difference of different antenna signals
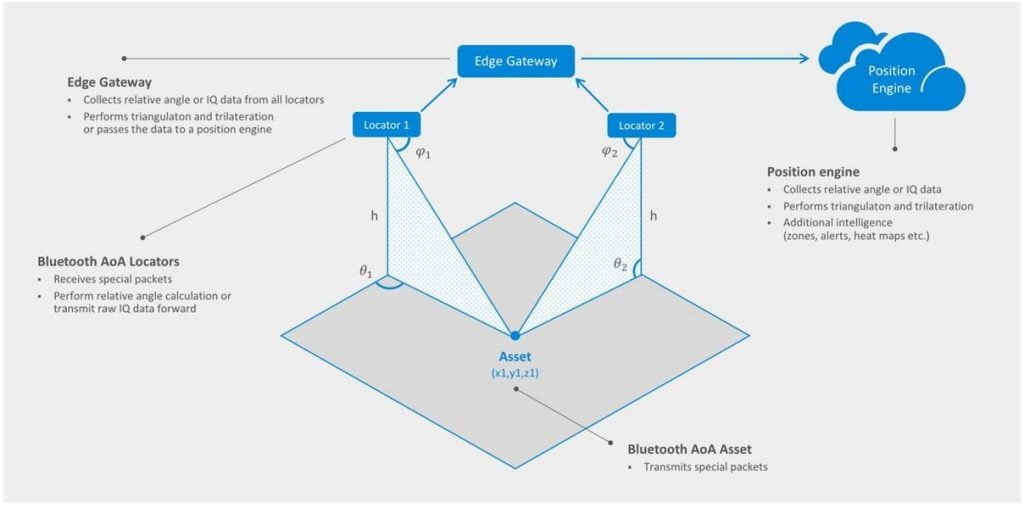
AoA technology only provides relative azimuth and/or elevation angle data between the sending and receiving devices, and other information is needed to calculate the absolute X, Y, and Z coordinates of the Bluetooth asset tag. Figure shows the mechanism to achieve this calculation. In this example, the receiver coordinates and direction are known, and AoA is used to derive azimuth and elevation data from the Bluetooth asset tag.
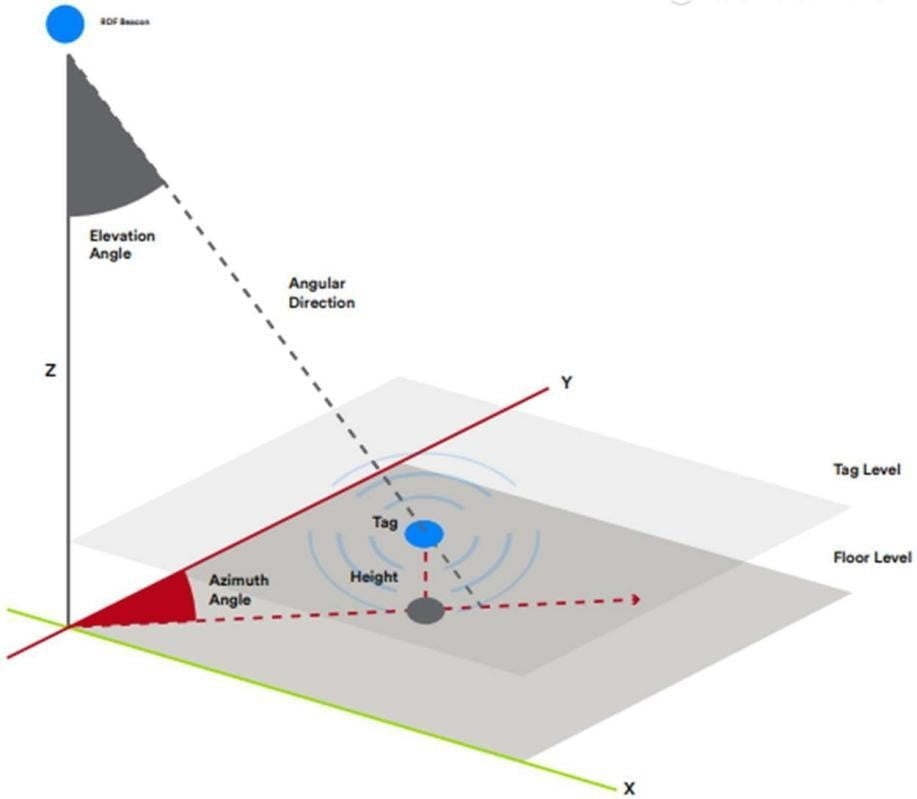
Determine the X, Y, and Z coordinates of the Bluetooth asset tag from the known location of the Bluetooth receiver and the azimuth and elevation information generated by AoA
There are other ways to calculate the X, Y, and Z coordinates of the tracked device, such as using multiple receivers to detect the signal sent by the asset tag, and then using triangulation or trilateral measurement to
calculate the asset location.
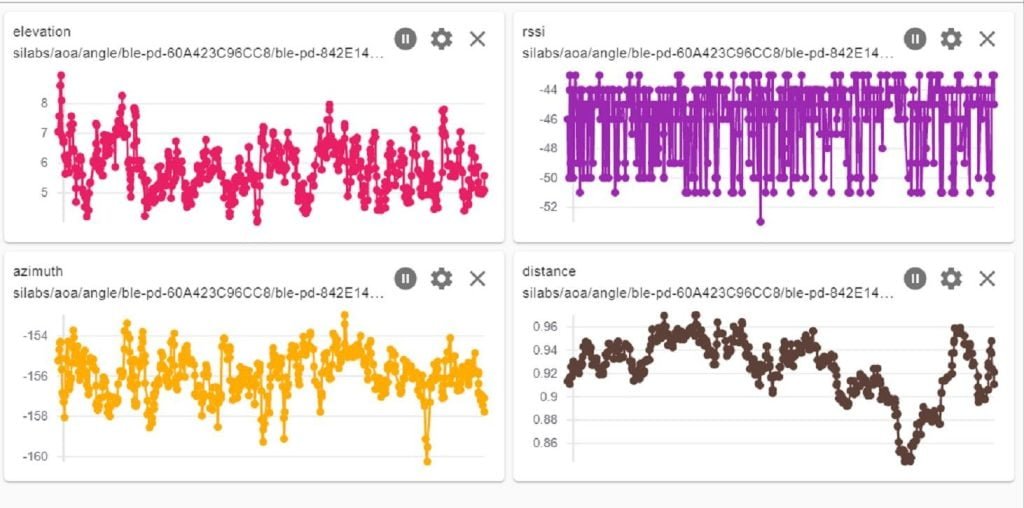
6. I/Q data
Elevation, RSSI, Azimuth, Distance
7. Signal Gateway - Two Dimensional Locating
A single gateway calculates and obtains the actual heading angle/pitch angle of the tag, and obtains a uniqueray. According to the determined tag height, a single gateway can calculate and obtain a unique spatial absolute coordinate.
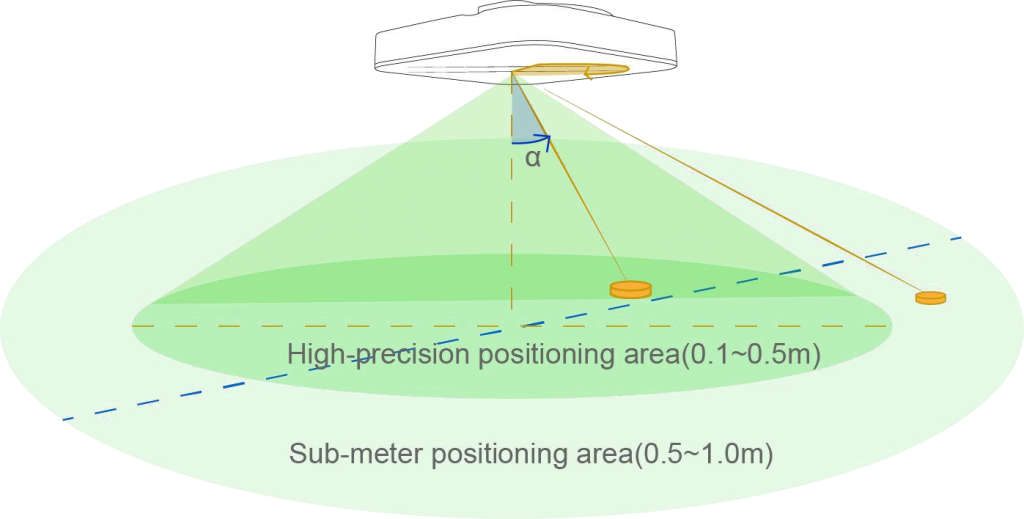
Coverage depends on your installation height, Angle α maximum value:
Height =h , α= 60℃ ,Coverage r= h*tagα ≈2h
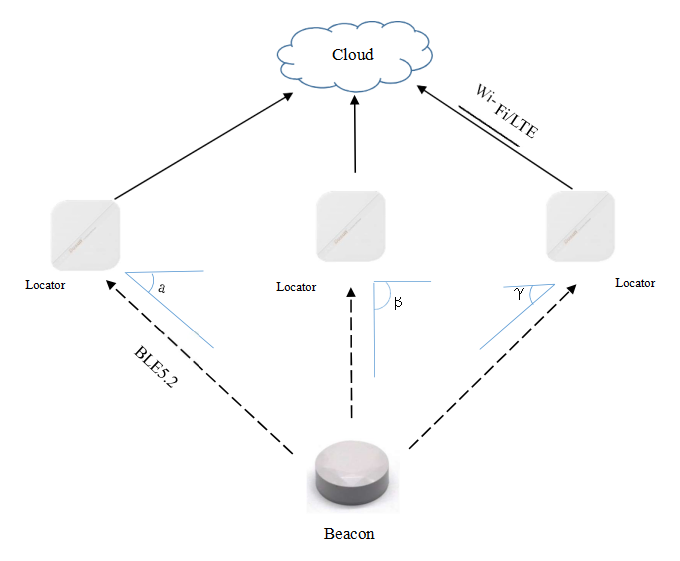
8. Multiple gateways - Large Area
The strap-down combination of multiple gateways obtains a larger positioning coverage space, and multiple anchor course angel calculations improve the global spatial accuracy level.
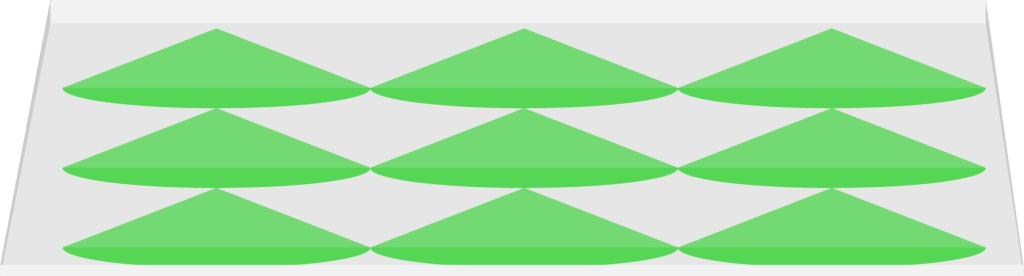
As follows
9. Beacons
Using Nordic beacons, the beacon broadcast frequency is 1s, and the maximum number is 50
Using silicon labs beacons, there is an enhanced method, which can support up to 1000 beacons
10. Application scenarios
• Real-time tracking of the elderly and children
• Product tracking
• Tool management
• Indoor navigation
• Asset positioning
Documentations
DusunIoT offers full set of development resources including QUICK START, SDK, Firmware packaging, module firmware, Tools, vairous third party software,etc.